
Vision-based Control of MeArm Manipulator
This is a small project I did with fellow engineering students in Industrial Robotics, a grad-level robotics course,
under the supervision of Dr. Tim Salcudean. The specification for this
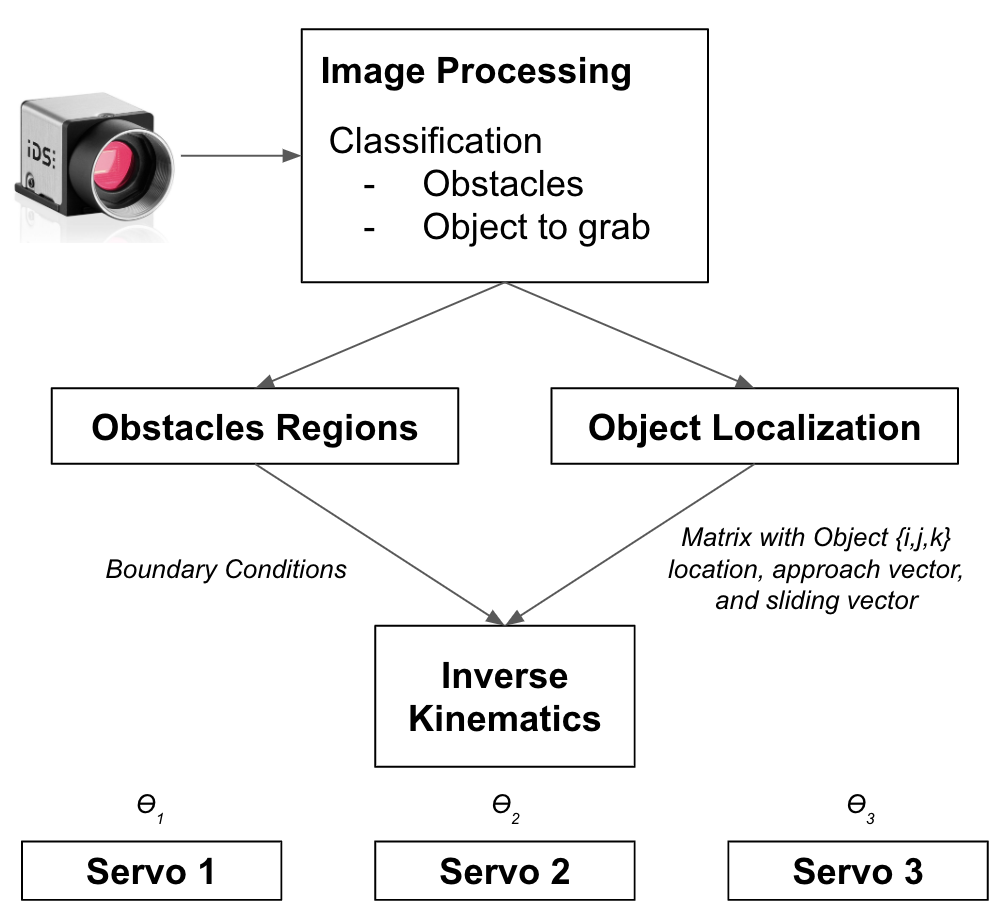
project is to design a low cost robot arm that can retrieve objects in a given arena, using computer
vision and inverse kinematics techniques.
| System Level Diagram | Retrieval Demo |
|---|---|
 |
 |
For more detailed information, please contact me directly.