
 |
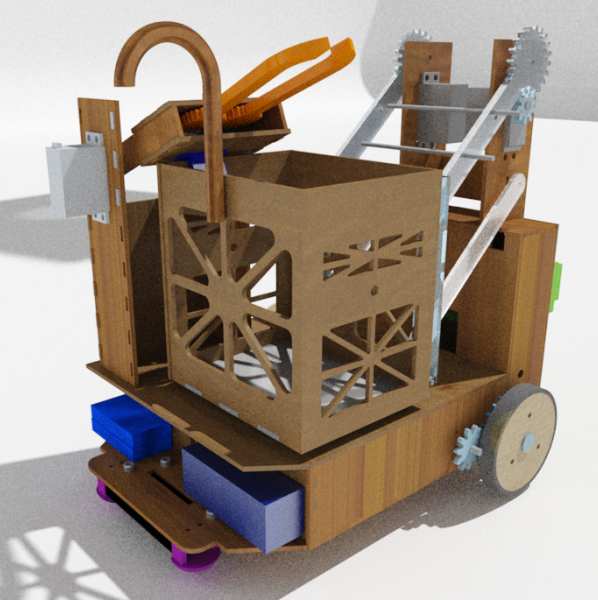 |
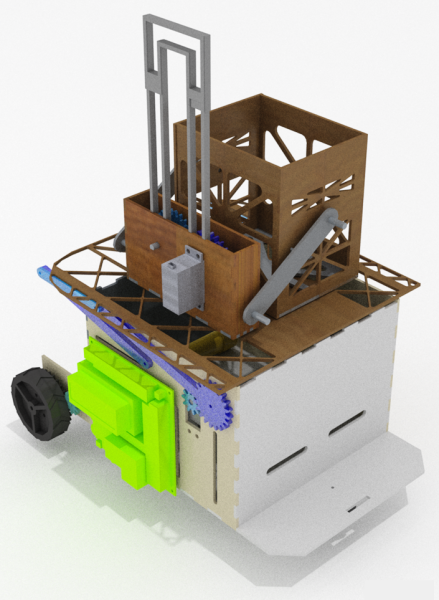
Two versions of Pomme de Terror (L: 1st Version R: Final Version)
When designing chassis, one has to consider various aspects, such as materials, manufacturing, flexibility, conduction, overheating, space for elec components, easy access to important parts, size constrain, etc. What I did first was to rank the priority of each critical aspect, then quickly built the first prototype made of cardboard to further study the system. (cardboard allowed us to easily drill holes, mark lines, epoxy extra parts, etc.) After several iterations, my team and I compiled a full list of things to adjust, and the CAD model of final version is shown on the right.
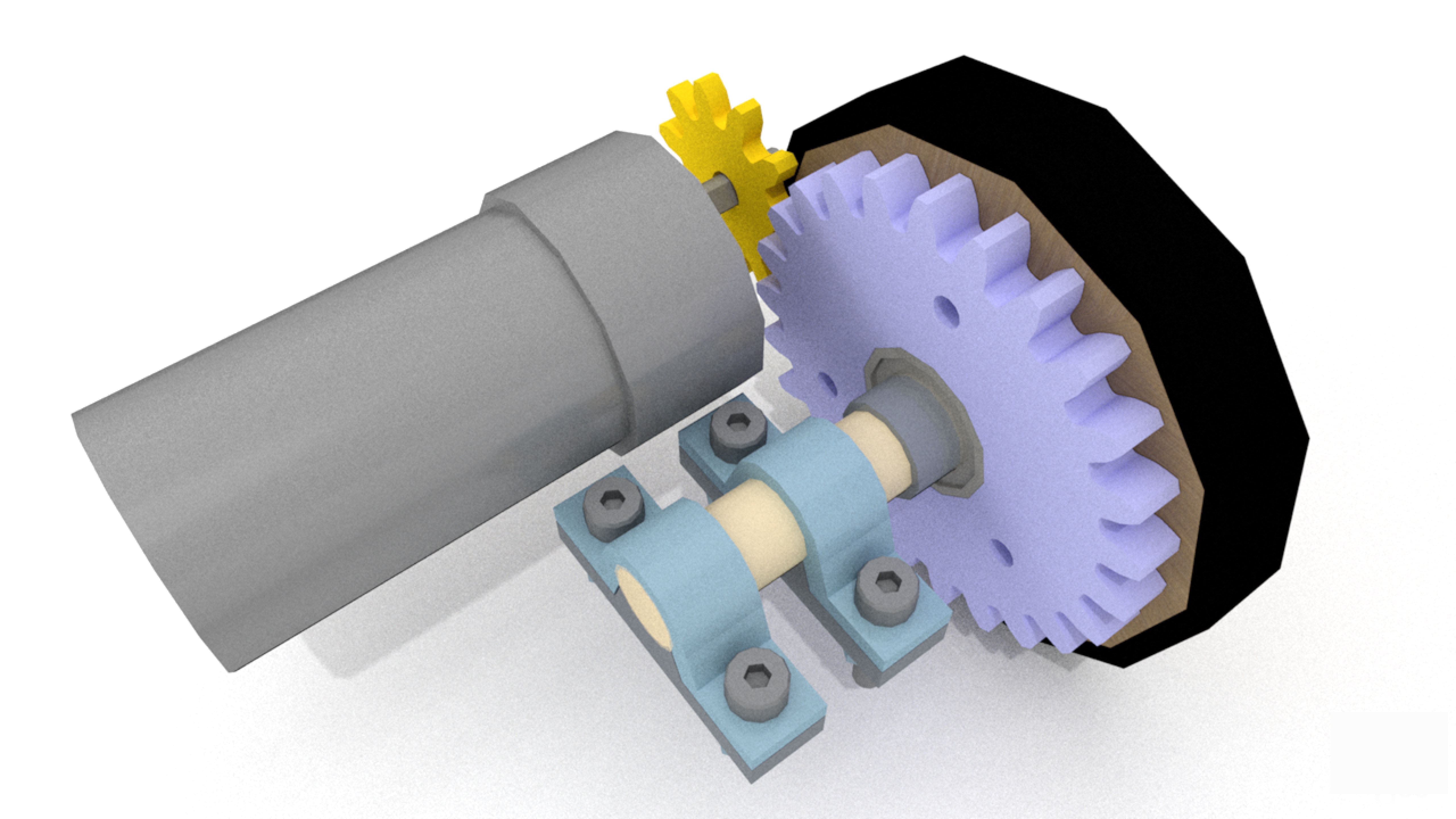
Mouse over to see motor analysis plot
Since robot has to climb a ~10 degrees ramp, the gear ratio of drive train system has to be determined to provide enough torque. Some analysis was done, leading towards 3:1 gear ratio for highest efficiency and flexible rpm. For suspension, the original design was the simplest dependent suspension system, beam axle which consists of a shaft and two wheels. But later on, considering about space for elec components, two independent shafts with clamps were used.(Laser Cutter made sure shafts are perfectly aligned)
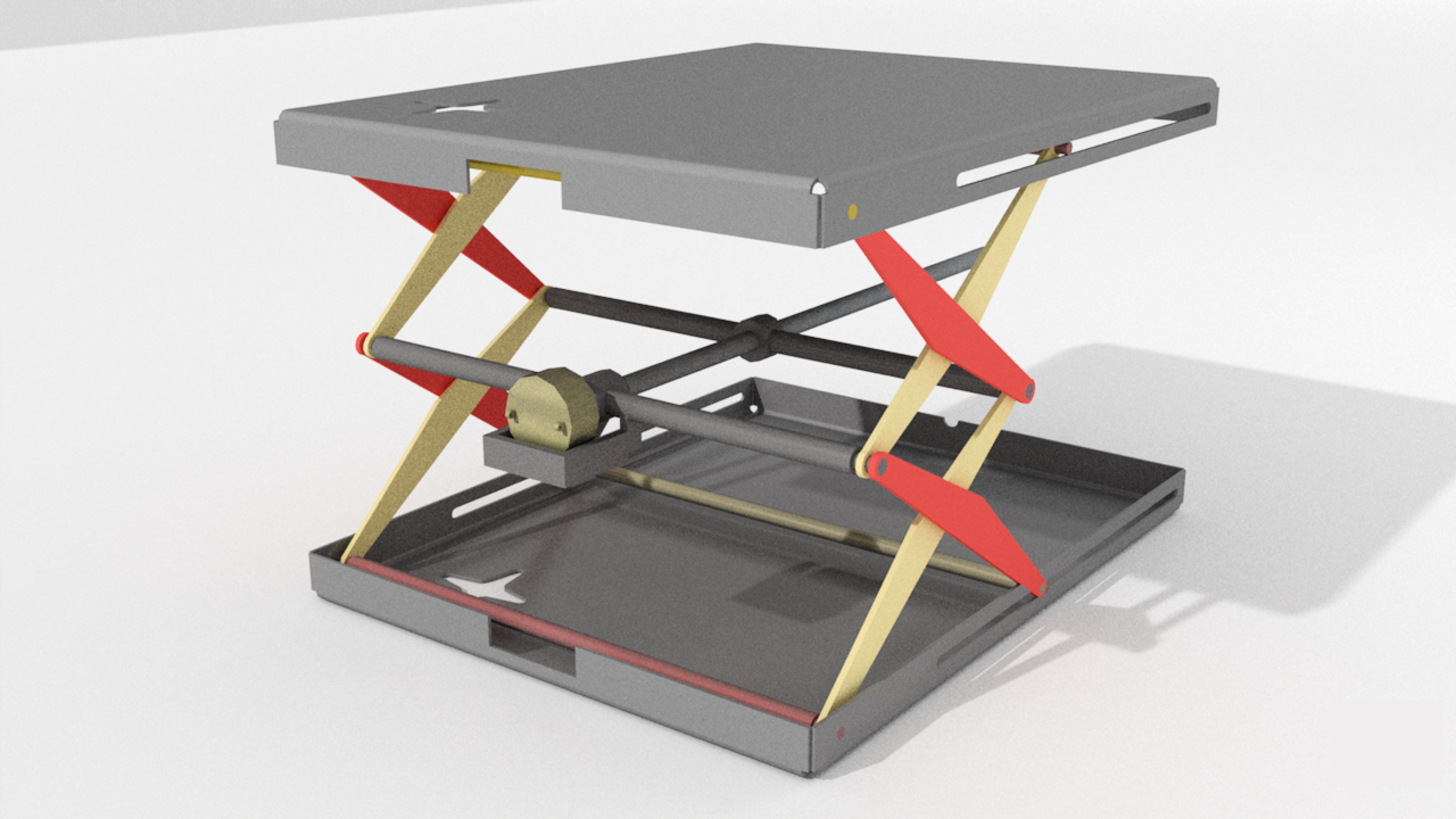
The original idea of the lifting mechanism was given the specification of being able to raise the platform (~350g) 20 cm high by using only one HK15138 Servo to prevent too much current draw. A basic pulley system combined with scissor jack was implemented.
| Lifting Mechanism 1 | Lifting Mechanism 2 |
|---|---|
| Due to large horizontal space taken by the pulley system, we decided to hold this idea. | Four bar linkage system with gear ratio of 1.5:1 is able to lift 350g (including basket weight) ~15cm. |
 |
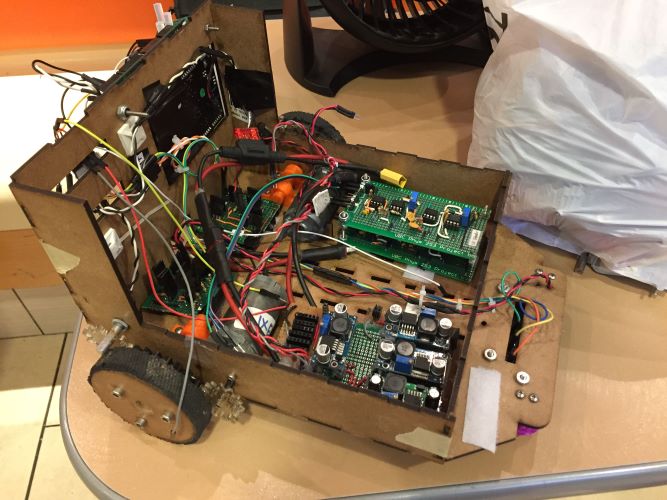 |
The internal space of pomme de terror is very limited due to size constrain (< a 24'' cube) and large mechanical parts, lifting, basket and claw tower. We also encountered issue such as voltage regulator overheating and shorting. So wires were orgnized by using zip ties and clamping to avoid accident contact.